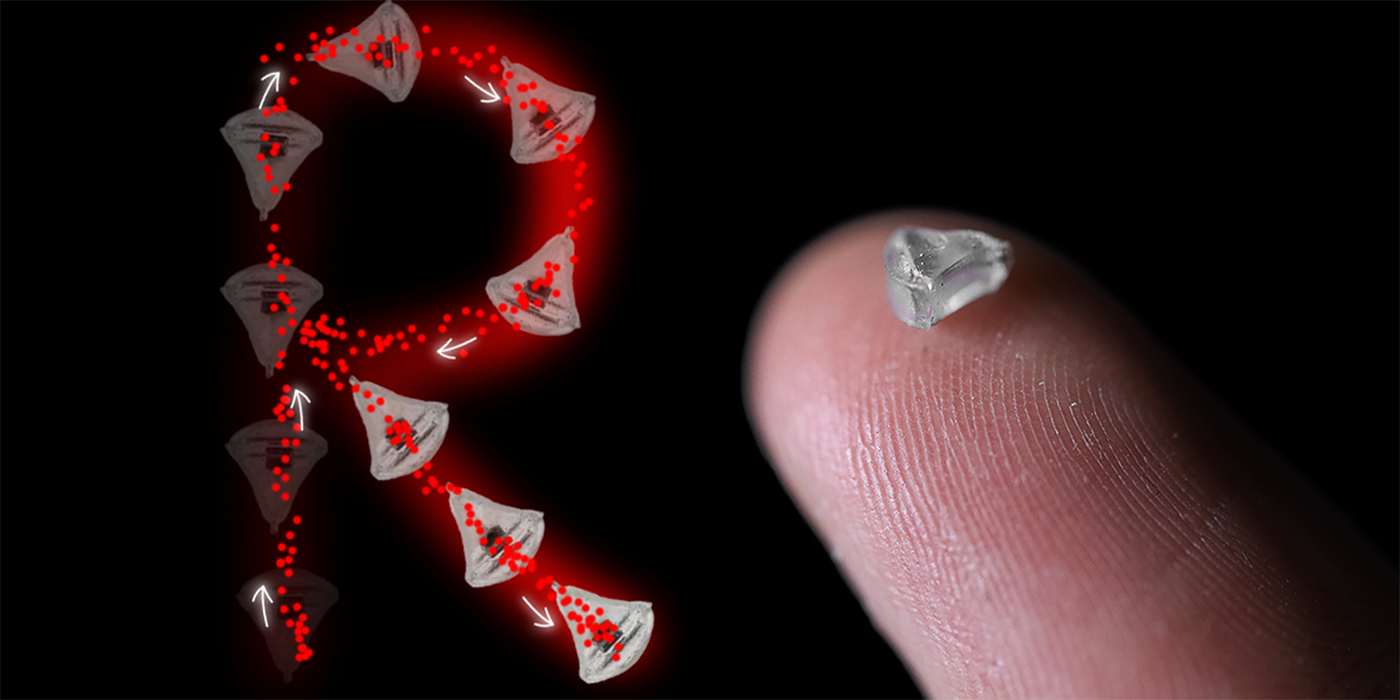
R-förmiger Bewegungspfad eines SMOL-gesteuerten Miniaturroboters. (Foto: DKFZ)
Oder Messungen in Geweben vornehmen oder chirurgische Eingriffe durchführen. Das ist die „Medizin der Zukunft“. Wissenschaftler vom Deutschen Krebsforschungszentrum (DKFZ) haben ein drahtloses Sensorverfahren auf Basis eines oszillierenden Magneten erfunden, das solche medizinischen Anwendungen deutlich verbessern kann.
Echtzeit-Tracking durch SMOL
Mit einer neu entwickelten Methode beschreibt das Team um Tian Qiu von DKFZ, Standort Dresden, eine neue Lösung: Das winzige Gerät, das die Wissenschaftler entwickelt haben, basiert auf einem magnetischen Oszillator, also einem mechanisch schwingenden Magneten, der sich in einem millimetergroßen Gehäuse befindet. Ein äußeres Magnetfeld kann den Magneten mechanisch zur Schwingung anregen.
Wenn die Schwingung abklingt, kann dieses Signal mit Magnetsensoren erfasst werden. Das Grundprinzip ist vergleichbar mit der Kernspinresonanz in der MRT. Die Forscher bezeichnen die Methode als „Small-Scale Magneto-Oscillatory Localization“ (SMOL).
Mit SMOL kann die Position und Orientierung des kleinen Gerätes in großer Entfernung (über 10 cm), sehr genau (weniger als 1 mm) und in Echtzeit bestimmt werden. Im Gegensatz zu Tracking-Verfahren, die auf statischen Magneten basieren, kann SMOL Bewegungen in allen sechs Freiheitsgraden, also allen Raum- und Winkelkoordinaten, erfassen – und das mit deutlich höherer Signalqualität.
Da das Gerät nur schwache Magnetfelder erzeugt und benötigt, ist es für den Körper unbedenklich. Zudem arbeitet es kabellos und ist mit vielen herkömmlichen Geräten und bildgebenden Verfahren kompatibel.
Präzisere Therapie durch Markierung von Tumoren
„Es gibt viele Anwendungsmöglichkeiten für die SMOL-Methode. Wir haben das System bereits in Miniaturroboter und Instrumente für die minimalinvasive Chirurgie integriert. Denkbar wäre eine Kombination mit Kapselendoskopen oder die Markierung von Tumoren für eine sehr präzise Therapie. Auch für vollautomatisierte Operationsroboter oder Augmented-Reality-Anwendungen könnte unsere Methode einen entscheidenden Vorteil bringen“, erklärt Felix Fischer, Erstautor der Publikation, die Einsatzmöglichkeiten.
F. Fischer, C. Gletter, M. Jeong, T. Qiu: Magneto-oscillatory localization for small-scale robots. npj Robotics 2024, DOI: https://doi.org/10.1038/s44182-024-00008-x
Erhalten Sie jetzt uneingeschränkten Zugriff auf alle interessanten Artikel.
- Online-Zugriff auf das PM-Report Heftarchiv
- Aktuelle News zu Gesundheitspolitik, Pharmamarketing und alle relevanten Themen
- 11 Ausgaben des PM-Report pro Jahr inkl. Specials
